
Low-back pain is the main cause of work leave and disability in workers who are exposed to peak or continuous spine loads, such as industry workers or surgeons, respectively. Current exoskeletons supporting these tasks generally reduce peak loads only by 10 – 20 %, which is not sufficient and, also, they are heavy and bulky, thus hindering subjects’ movements. Project 8 aims at developing and evaluating a model-based human-machine interface for the controller of an Exo-Aid which provides support for industry workers and surgeons. This exoskeleton will incorporate the technologies newly developed by projects 2-5. The exoskeletons’ controller will rely on a neuro-musculoskeletal model of the user, which will estimate in real-time the biomechanical and physiological variables needed to determine the amount of support. Such a model will be driven by several input signals such as EMG and body kinematics. The control will be based on user intention detection, thus, providing a transparent support without hindering movements and also, decoupling external perturbations.
The aim of the exoskeleton is to reduce excessive tissue load and muscle fatigue. The detection of these variables will be based on muscle electrical activity. Therefore, study of such variables will be central in the early stages of the project. Concurrently, the real-time musculoskeletal model used to estimate trunk loading (including variables such as joint moments, muscle forces and spine compression loads) will be developed and evaluated. In later stages of the project, control strategies will be developed to limit trunk loading in static and dynamic tasks, based on user-intention detection. Furthermore, calibration methods need to be implemented to adapt model parameters to each specific user, therefore, assuring optimal support for each subject.
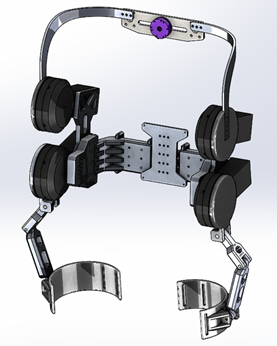
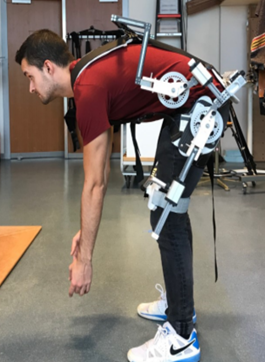
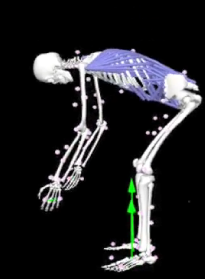
Lifting tasks and musculoskeletal model