One of the major consequences of a complete spinal cord injury is the loss of motor function below the level of lesion resulting in wheelchair dependence. Wearable exoskeletons for the legs enable people with a complete spinal cord injury to stand and walk. In recent years, many exoskeletons have been developed. Despite very promising results, current available exoskeletons have limitations hampering regular use. The main objective of this project is to develop an improved exoskeleton for people with spinal cord injury.
In this project the following aims will be addressed:
- Identify the user experiences with exoskeleton training and home use
- Optimize the human-exoskeleton interaction
- Develop and test an exoskeleton with integrated balance control
User experiences
First, the user experiences with exoskeleton training and home use with a commercially available exoskeleton will be evaluated. In addition, the needs and preferences of people with a complete spinal cord injury with regards to (future) exoskeletons will be identified. Finally, the desired technological improvements will be defined.
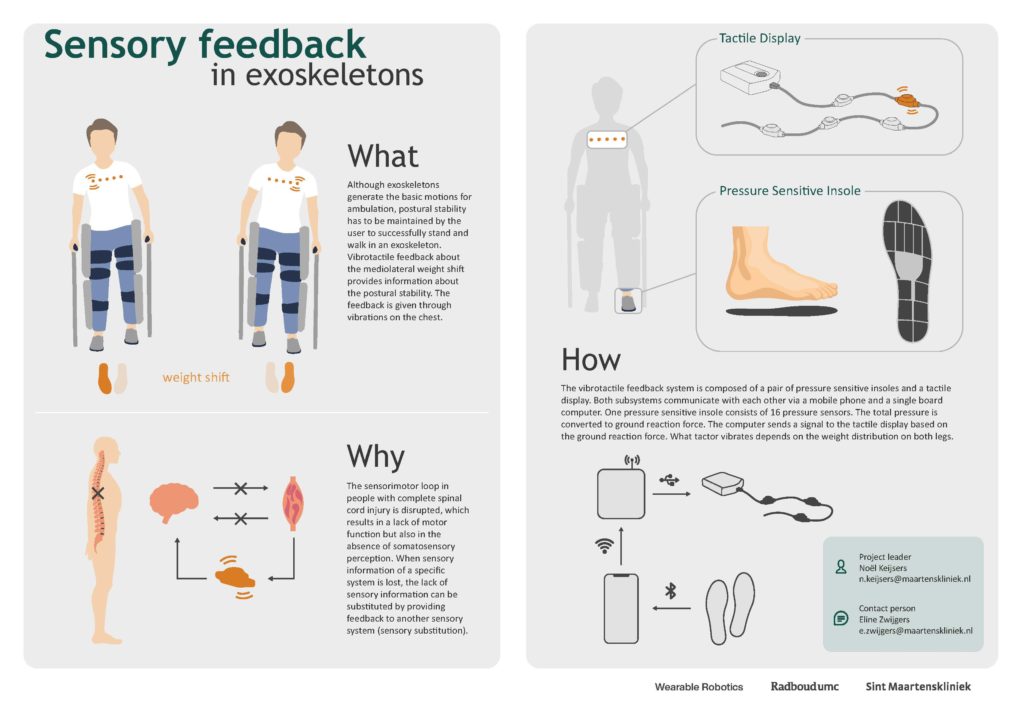
Human-exoskeleton interaction
Another part of the project focuses on the improvement of the human-exoskeleton interaction. Current exoskeletons take over the disrupted control of the legs, but they do not provide sensory feedback to the user. During the project, a sensory feedback system will be developed and evaluated. In addition, different options to control and adjust the step length and step direction will be tested.
Integrated balance control
Last, an improvement in exoskeleton balance control will be sought. To maintain balance in current exoskeletons, users have to rely on crutches. The use of crutches negatively impacts the usability of an exoskeleton. In this project, knowledge from the field of humanoid robots and exoskeleton control will be combined with knowledge of human balance strategies. With this knowledge, new balance control algorithms will be developed and tested to improve the autonomy of the user.